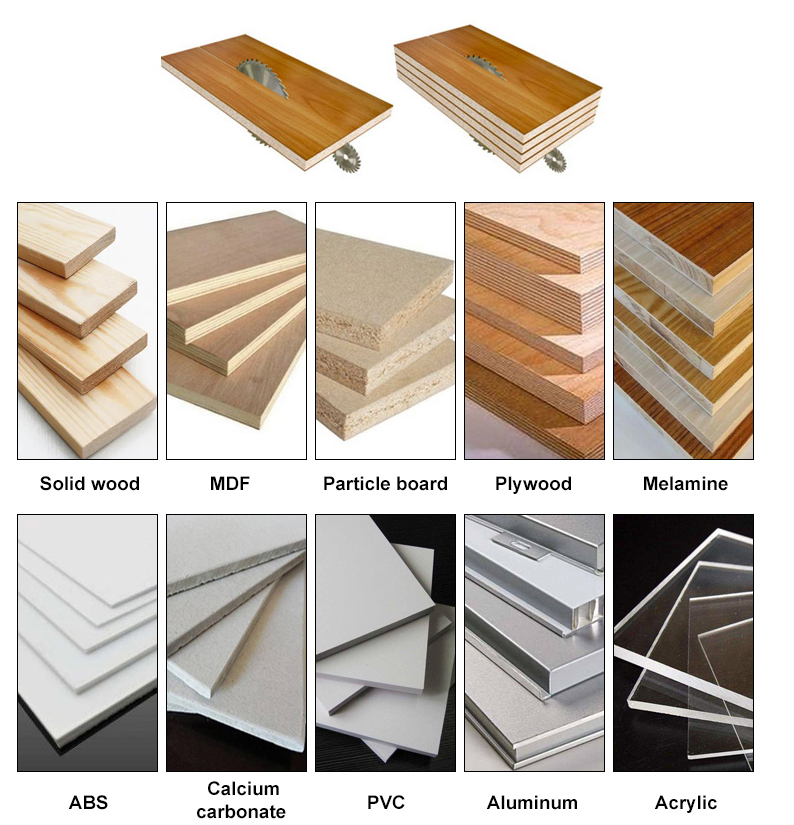
מסור פאנל HK380 מחשב CNC
מסור פאנל HK380 מחשב CNC
1. לפי רוחב צלחת הקלט, חתוך את הצלחת הנדרשת וחזור במהירות למצב העבודה המקורי.
2. מהירות החיתוך נשלטת על ידי ממיר תדרים, שיכול להתגבר על לוחות בעובי שונה וחומרים שונים.
3. האכלה מאמצת שולחן חרוז צף פנאומטי, וחומר הצלחת הכבד קל לשינוי. הרובוט ניזון אוטומטית, בעל עוצמת עבודה נמוכה ויעילות ייצור גבוהה.
4. השתמש במנוע דלתא סרוו מיובא כדי למנוע שגיאות מלאכותיות ולשפר את דיוק הממדים.
| KS-829CP | פָּרָמֶטֶר |
| מהירות חיתוך מקסימלית | 0-80 מ' לדקה |
| מהירות מרבית של הספק | 100 מ' לדקה |
| כוח מנוע מסור ראשי | 16.5 קילוואט (אופציונלי 18.5 קילוואט) |
| כוח מוחלט | 26.5kw (אופציונלי28.5kw) |
| גודל עבודה מקסימלי | 3800L*3800W*100H(mm) |
| גודל עבודה מינימלי | 34L*45W(mm) |
| גודל כולל | 6300x7500x1900 מ"מ |
עמוד בדרישות של עיבוד צלחות גדולות, עם גודל ניסור מרבי של 3800 * 3800 מ"מ ועובי ניסור של 105 מ"מ, וישימות רחבה יותר.
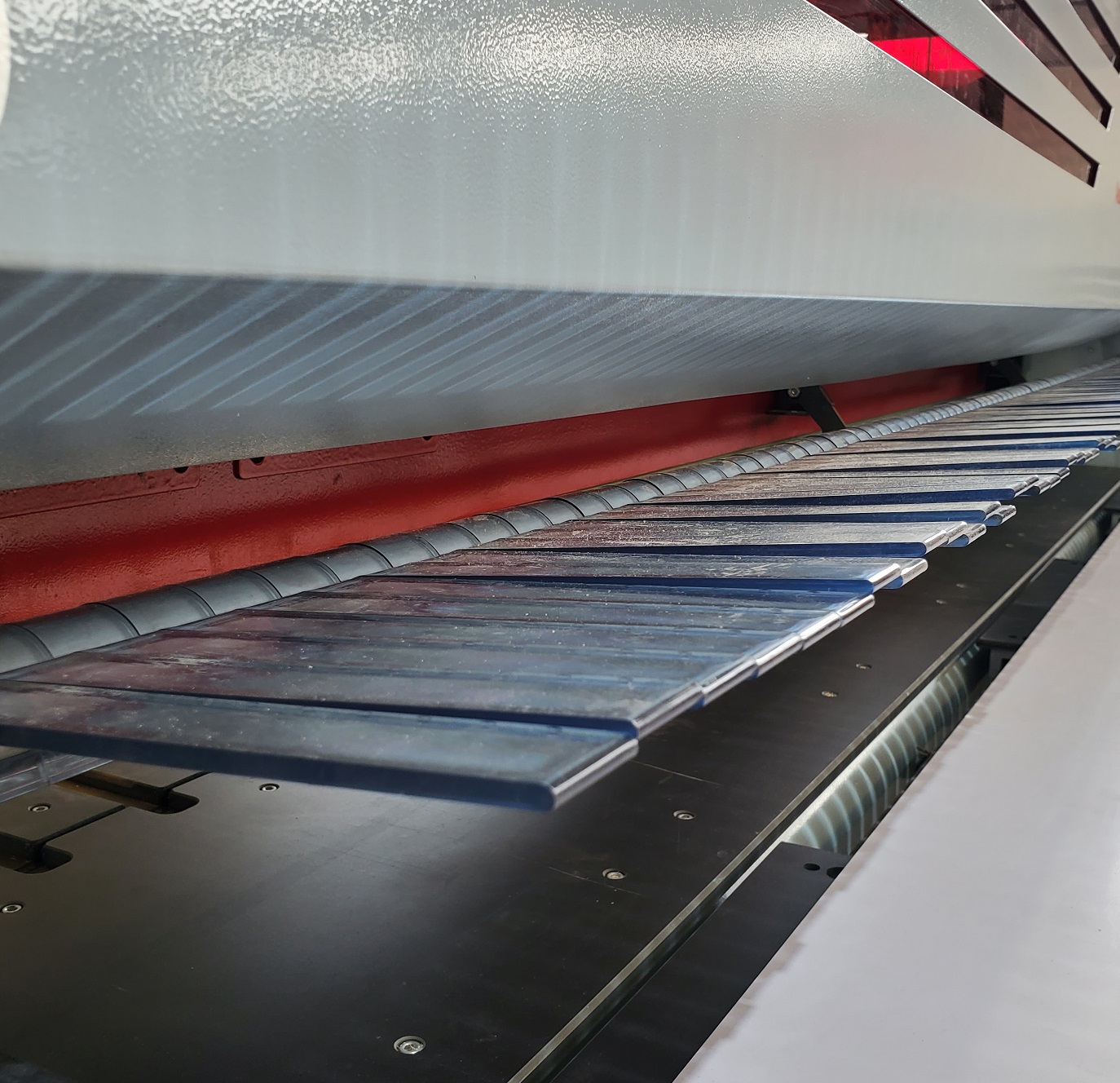
פירוט מכונה
עונה על הדרישות של עיבוד צלחות גדולות, עם גודל ניסור מרבי של 3800 * 3800 מ"מ ועובי ניסור של 105 מ"מ, וישימות רחבה יותר

יד מהדק מכני סרוו
11 קליפ מכני בעיצוב הגדול ביותר

הזרוע הרובוטית מאמצת מפחית ציוד תולעת בדיוק גבוה ומתלה ציוד הזנה, עם דיוק חיתוך של ± 0.1 מ"מ

שולחן העבודה עשוי מפלטפורמה צפה פניאומטית. קל מאוד להזיז את הפאנלים.

ניתן להחליף את מסור הניקוד באופן אוטומטי בהתאם לצרכי הניסור. שתפו פעולה עם המסור הראשי לניסור איכותי.
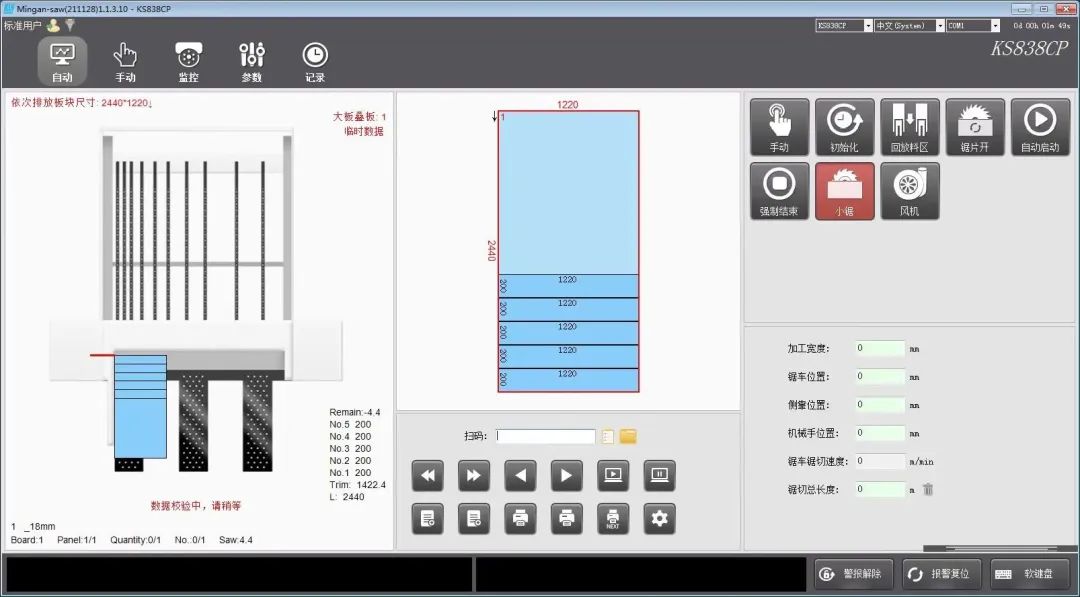
תוכנת אופטימיזציה אופציונלית לאופטימיזציה אוטומטית של פריסת החומר וניסור.
לִטעוֹם